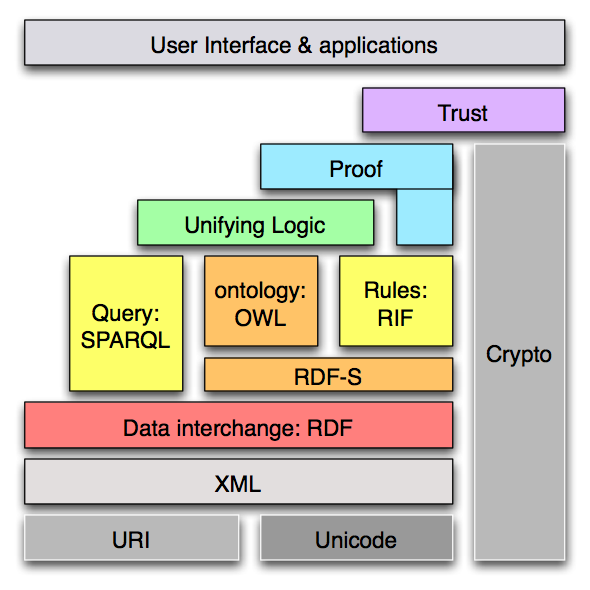
Layer Cake
2022-08
https://josd.github.io/Talks/2022/08swig/
by Jos De Roo of KNoWS office of IDLab - Ghent University - imec.
All knowledge is just a set of statements
<#pat> <#knows> <#jo> .
### in classical logic: knows(pat,jo)
Here a local URI but could point to ANY document
Verb known as predicate in the statement
# subject verb object
#============= ========== ==============
{ ?x :son ?y } => { ?y a :Male }.
{ ?x :son ?y } log:implies { ?y a :Male }.
### in classical logic: ∀x ∀y son(x,y) ⇒ male(y)
The terms in braces { } are formulas.
The rule statement relates two formulas.
Given:
William :likes :spaghetti.
Query:
{?x :likes :spaghetti} => {?x :likes :pizza}.
Result:
:William :likes :pizza.
Given:
:William :likes :spaghetti.
{?x :likes :spaghetti} => {?x :likes :pizza}.
Closure:
:William :likes :spaghetti.
:William :likes :pizza.
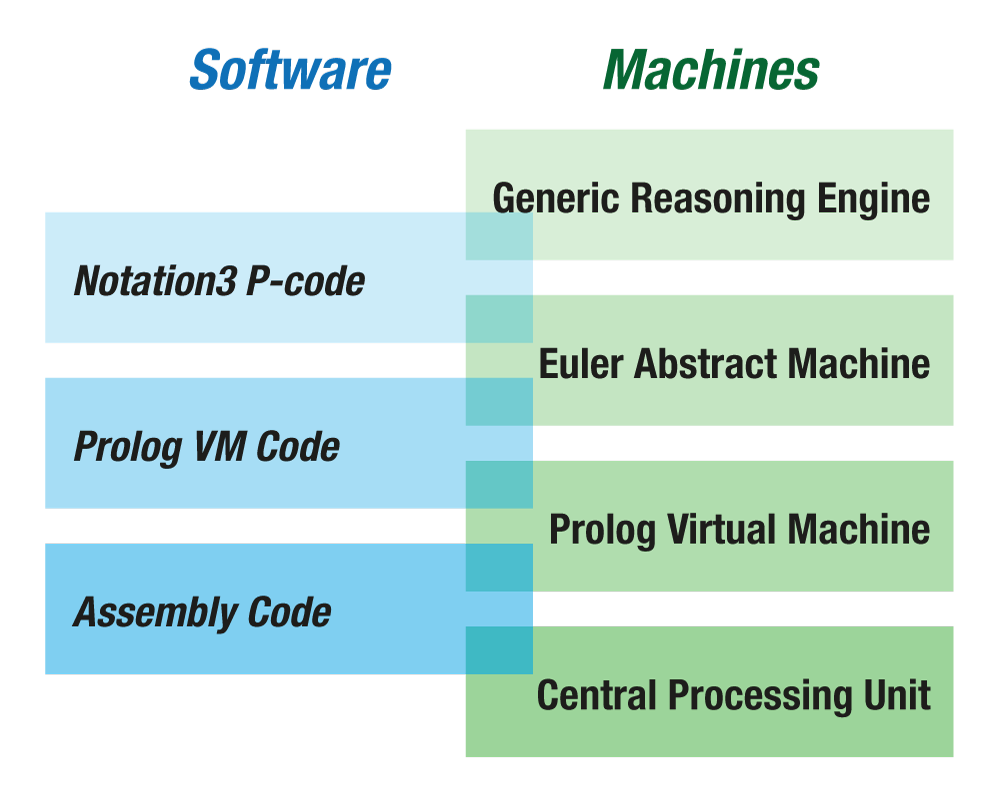
This is what the basic EAM (Euler Abstract Machine) does in a nutshell:
In N3 you can indicate how a rule should be applied:
{?x :likes :Spaghetti} => {?x :likes :Pizza}.
{?x :likes :Pizza} <= {?x :likes :Spaghetti}.
[] a r:Proof, r:Conjunction;
r:component <#lemma1>;
r:component <#lemma2>;
r:gives {
:Socrates a :Human.
:Socrates a :Mortal.
}.
...
<#lemma5> a r:Inference;
r:gives { :Socrates a :Mortal };
r:evidence ( <#lemma6> <#lemma3> );
r:binding [ r:variable [ n3:uri "http://josd.github.io/var#x_0"]; r:boundTo [ n3:uri "http://example.org/socrates#Human"]];
r:binding [ r:variable [ n3:uri "http://josd.github.io/var#x_1"]; r:boundTo [ n3:uri "http://example.org/socrates#Mortal"]];
r:binding [ r:variable [ n3:uri "http://josd.github.io/var#x_2"]; r:boundTo [ n3:uri "http://example.org/socrates#Socrates"]];
r:rule <#lemma7>.
<#lemma6> a r:Extraction;
r:gives { :Human rdfs:subClassOf :Mortal };
r:because [ a r:Parsing; r:source <http://josd.github.io/eye/reasoning/socrates/socrates.n3>].
<#lemma7> a r:Extraction;
r:gives {
@forAll var:x_0, var:x_1, var:x_2. {var:x_0 rdfs:subClassOf var:x_1.
var:x_2 a var:x_0} => {var:x_2 a var:x_1}.
};
r:because [ a r:Parsing; r:source <http://josd.github.io/eye/reasoning/socrates/socrates.n3>].
Usage: eye <options>* <data>* <query>*
<data>
[--n3] <uri> N3 triples and rules
--blogic <uri> RDF surfaces
--n3p <uri> N3P intermediate
--proof <uri> N3 proof lemmas
--turtle <uri> Turtle triples
<query>
--entail <rdf-graph> output true if RDF graph is entailed
--not-entail <rdf-graph> output true if RDF graph is not entailed
--pass output deductive closure
--pass-all output deductive closure plus rules
--pass-all-ground ground the rules and run --pass-all
--pass-only-new output only new derived triples
--query <n3-query> output filtered with filter rules
<options>
--csv-separator <separator> CSV separator such as , or ;
--debug output debug info on stderr
--debug-cnt output debug info about counters on stderr
--debug-djiti output debug info about DJITI on stderr
--debug-pvm output debug info about PVM code on stderr
--help show help info
--hmac-key <key> HMAC key used in e:hmac-sha built-in
--ignore-inference-fuse do not halt in case of inference fuse
--image <pvm-file> output all <data> and all code to <pvm-file>
--intermediate <n3p-file> output all <data> to <n3p-file>
--license show license info
--multi-query go into query answer loop
--no-distinct-input no distinct triples in the input
--no-distinct-output no distinct answers in the output
--no-numerals no numerals in the output
--no-qnames no qnames in the output
--no-qvars no qvars in the output
--no-ucall no extended unifier for forward rules
--nope no proof explanation
--profile output profile info on stderr
--quantify <prefix> quantify uris with <prefix> in the output
--quiet quiet mode
--random-seed create random seed for e:random built-in
--restricted restricting to core built-ins
--rule-histogram output rule histogram info on stderr
--skolem-genid <genid> use <genid> in Skolem IRIs
--source <file> read command line arguments from <file>
--statistics output statistics info on stderr
--strings output log:outputString objects on stdout
--tactic limited-answer <nr> give only a limited number of answers
--tactic limited-brake <nr> take only a limited number of brakes
--tactic limited-step <nr> take only a limited number of steps
--tactic limited-witness <nr> use only a limited number of witnesses
--tactic linear-select select each rule only once
--version show version info
--warn output warning info on stderr
--wcache <uri> <file> to tell that <uri> is cached as <file>
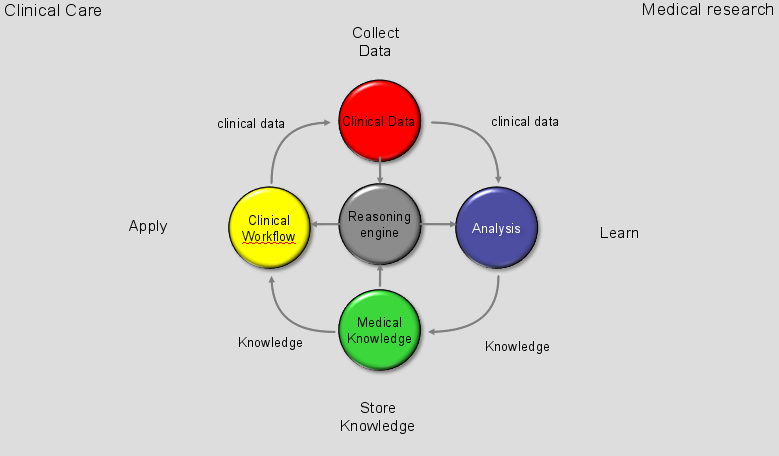
The GPS4IntegratedCare project objective is Automatic generation of dynamic and personalized care workflows
Technologies used:
Goal driven Parallel Sequences (GPS):
The project worked out fine, but the architecture is centralized around a single smart workflow engine and that is really not scalable.
The proposal is to address the scalability with MAP
Multi-Agent Proofs (MAP):
This is just a proposal with a proof of concept in which agent1 and agent2 are GPS agents and agent2 reaches his goal thanks to the lemmata made by agent1.
Agent2-proof makes use of lemma9 from Agent1-proof
<#lemma13> a r:Extraction;
r:gives {
<http://josd.github.io/eye/reasoning/map/agent1-proof.n3#lemma9> a r:Inference.
};
r:because [ a r:Parsing; r:source <http://josd.github.io/eye/reasoning/map/agent1-proof.n3>].
<#lemma14> a r:Extraction;
r:gives {
<http://josd.github.io/eye/reasoning/map/agent1-proof.n3#lemma9> r:gives {
:map-BE gps:description ({:i1 :location :Gent} true {:i1 :location :Brugge} :drive_gent_brugge 1500.0 0.006 0.96 0.99)
}.
};
r:because [ a r:Parsing; r:source <http://josd.github.io/eye/reasoning/map/agent1-proof.n3>].
The burden of proof is now on the server:
Reverse the burden of proof:
This is much more scalable but requires client side reasoning + proof generation
The proof could be provided as HTTP GET payload
triples cycles | cwm eye jena
| [sec] [sec] [sec]
------------------------|------------------------------------
10,000 1,518 | 15.400 0.420 3.200
100,000 645 | 99.860 2.190 9.310
1,000,000 380 | 1,094.860 21.170 75.380
10,000,000 480 | (OutOfMem) 231.610 853.060
100,000,000 480 | 2,640.580 9,217.800
1,000,000,000 431 | 32,474.540 (OutOfMem)
Test environment:
Linux 4.0.5 x86_64
processor : 0
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 1
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 2
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 3
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
MemTotal: 264163268 kB
Reference:
http://eulersharp.sourceforge.net/2014/11bmb/README.md
depth | cwm eye hermit jdrew jena
| [sec] [sec] [sec] [sec] [sec]
---------------|------------------------------------------------------------
10 | 0.160 0.018 0.055 0.130 0.047
100 | 1.050 0.022 1.040 0.200 0.422
1,000 | 65.930 0.063 3.580 0.870 9.302
10,000 | 7,298.000 0.482 310.510 18.680 2,597.242
100,000 | 732,974.070 4.808 (OutOfMem) 1,875.000 (OutOfMem)
1,000,000 | (848 days) 48.434 (OutOfMem)
Test environment:
Linux 4.0.5 x86_64
processor : 0
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 1
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 2
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 3
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
MemTotal: 264163268 kB
Reference:
http://ruleml.org/WellnessRules/files/WellnessRulesN3-2009-11-10.pdf
length | cwm eye
| [sec] [sec]
---------------|------------------------
2 | 0.188 0.029
4 | 0.371 0.032
8 | 1.004 0.038
16 | 3.504 0.053
32 | 13.968 0.085
64 | 58.689 0.157
128 | 251.361 0.344
256 | 1,081.179 0.936
512 | (MaxRecurs) 2.894
1,024 | 9.764
Test environment:
Linux 4.0.5 x86_64
processor : 0
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 1
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 2
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
processor : 3
model name : Intel(R) Xeon(R) CPU E5-2665 0 @ 2.40GHz
MemTotal: 264163268 kB
Reference:
https://github.com/RubenVerborgh/RESTdesc-Composition-Benchmark