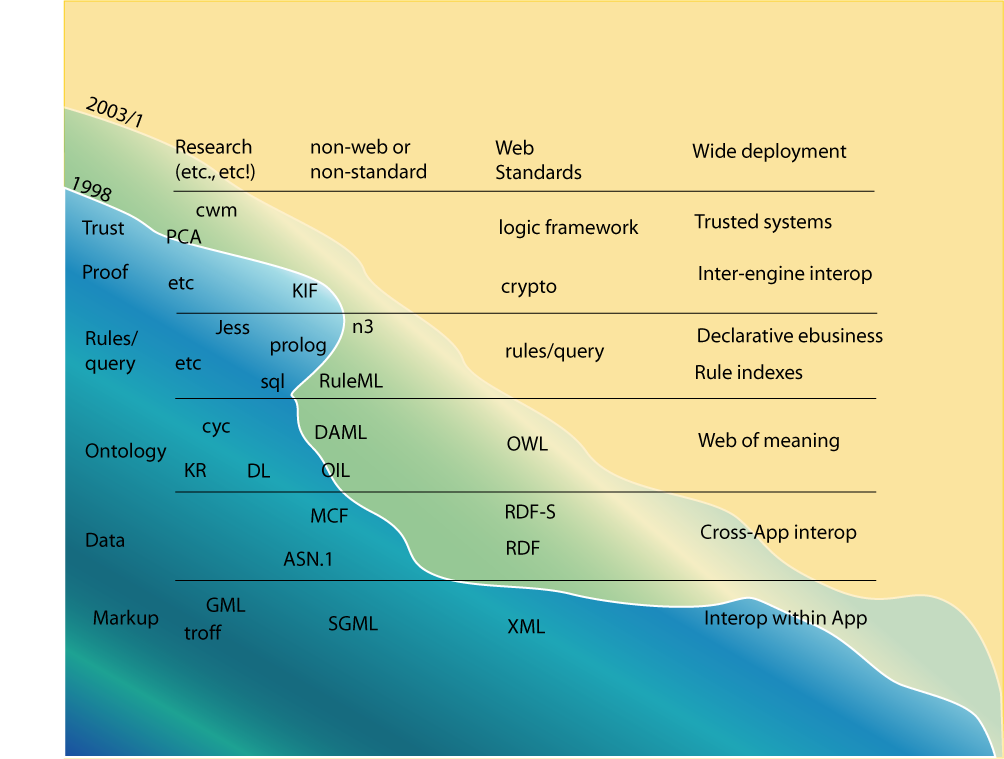
We want inter-engine interop which requires proof: SemWave diagram from Tim Berners-Lee
2022-06
https://josd.github.io/Talks/2022/06welding/
by Jos De Roo of KNoWS office of IDLab - Ghent University - imec.
The GPS4IntegratedCare project objective is Automatic generation of dynamic and personalized care workflows
Technologies used:
Goal driven Parallel Sequences (GPS):
The project worked out fine, but the architecture is centralized around a single smart workflow engine and that is really not scalable.
The proposal is to address the scalability with MAP
Multi-Agent Proofs (MAP):
This is just a proposal with a proof of concept in which agent1 and agent2 are GPS agents and agent2 reaches his goal thanks to the lemmata made by agent1.
Agent2-proof makes use of lemma9 from Agent1-proof
<#lemma13> a r:Extraction;
r:gives {
<http://josd.github.io/eye/reasoning/map/agent1-proof.n3#lemma9> a r:Inference.
};
r:because [ a r:Parsing; r:source <http://josd.github.io/eye/reasoning/map/agent1-proof.n3>].
<#lemma14> a r:Extraction;
r:gives {
<http://josd.github.io/eye/reasoning/map/agent1-proof.n3#lemma9> r:gives {
:map-BE gps:description ({:i1 :location :Gent} true {:i1 :location :Brugge} :drive_gent_brugge 1500.0 0.006 0.96 0.99)
}.
};
r:because [ a r:Parsing; r:source <http://josd.github.io/eye/reasoning/map/agent1-proof.n3>].
The burden of proof is now on the server:
Reverse the burden of proof:
This is much more scalable but requires client side reasoning + proof generation
The proof could be provided as HTTP GET payload